
Broadcast environments typically have large systems featuring devices from many vendors which can lead to concerns about the effects of Grandmaster (GM) changeovers. SPG9000’s Dynamic Priority offers broadcasters a significant improvement in clock management. Read on to learn how this recent innovation from Telestream provides more effective changeover control for minimized workflow disruptions.
The Challenge of GM Changeovers
BMCA-controlled GM changeovers are necessary when faults or clock quality changes occur in a PTP network. When faults are removed or the clock quality is restored, a second GM change typically occurs, even though it is not strictly necessary when both GMs have the same clock quality. Avoiding or deferring this change to a non-critical time is ideal. Dynamic Priority allows this control without compromising the ability of the system to react to faults.
Use Case 1: Redundant GNSS-Connected SPG9000s
A simple PTP network with redundant Telestream SPG9000 timing and reference sync generators demonstrates the benefits of Dynamic Priority. Figure 1 shows both SPG9000s using GNSS as the reference and thus, they have the same values for the clock quality parameters. It is common to configure both SPG9000s with the same priority 1 value and use different priority 2 values to designate one SPG9000 to be the primary grandmaster.
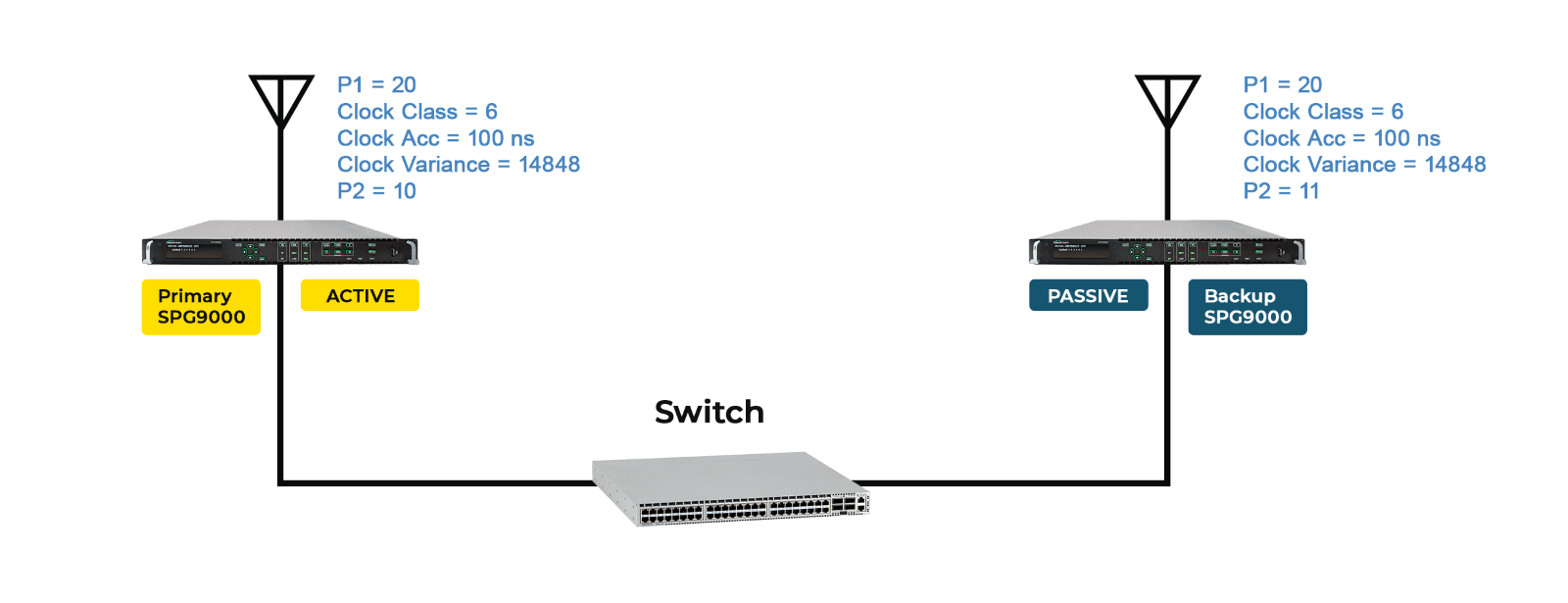
Figure 1 – Basic PTP network with redundant GMs
If the GNSS signal to the primary SPG9000 is lost, clock quality will be degraded, and the backup SPG will take over the GM roll as directed by the BMCA. This behavior is desirable to maintain PTP accuracy.
If the GNSS signal is restored to the primary SPG9000 in a system not using Dynamic Priority, the SPG9000 will resume the GM role. This second GM change is not usually necessary. The two SPG9000s are both connected to GNSS and have the same clock quality. The second change is only mandated by the value configured in the priority 2 parameter.
Preventing Unnecessary Changeovers with Dynamic Priority
Dynamic Priority prevents the second GM change as illustrated in Figure 2. In this case, Dynamic Priority is configured to modify the priority 2 value. When the backup SPG9000 becomes the active GM, it will apply an offset to the priority 2 value and thus be numerically lower and “better” than the primary SPG9000. Then when the GNSS signal is restored to the primary SPG9000, there would be no GM change since the backup SPG9000 has the better priority 2 value.
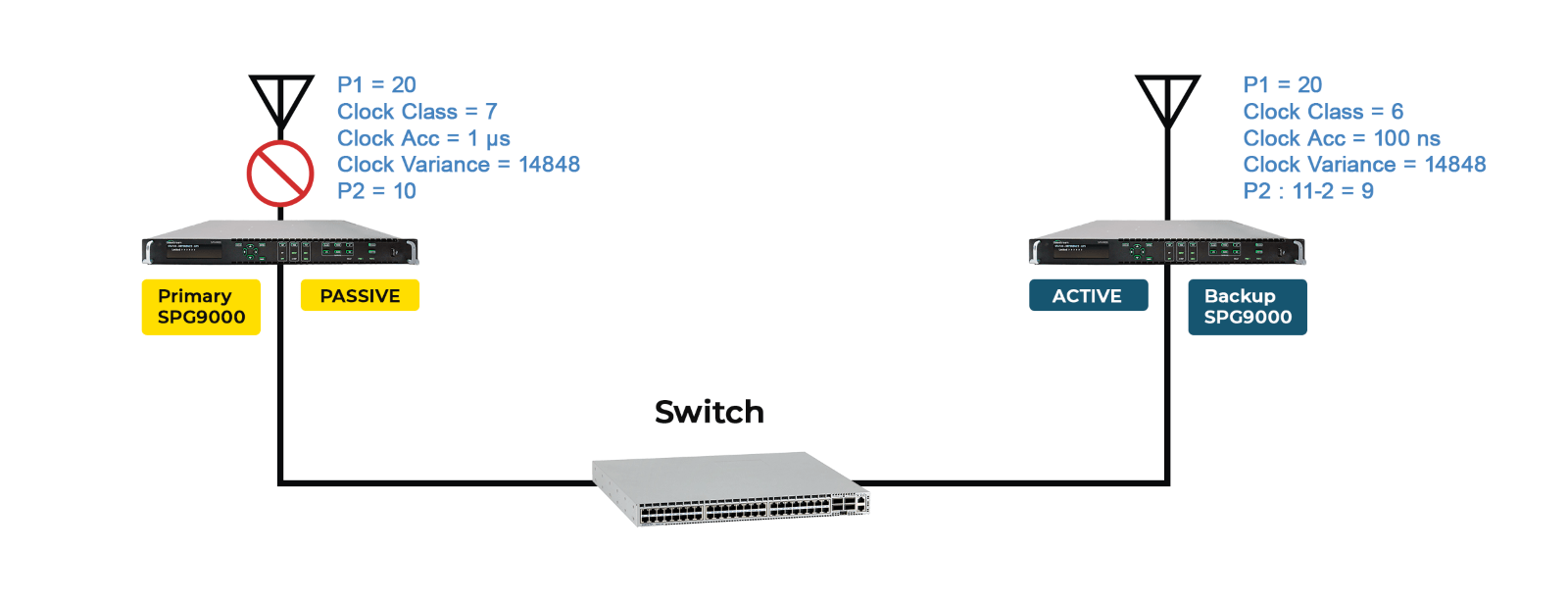
Figure 2 – GM2 with Dynamic Priority offset to Priority 2 value
Note that if the backup SPG9000 were to lose the GNSS signal, then the reduction in clock quality would take precedence over priority 2, and the GM role would revert to the primary SPG9000. The backup SPG9000 would detect it is no longer the active GM and remove the offset from the value of priority 2, while the primary SPG9000 would detect that it is now the active GM and modify its priority 2 value to assert itself as the preferred SPG9000.
This illustrates that the two SPG9000s, connected as redundant GMs with Dynamic Priority, still react to faults while avoiding unnecessary changes between equal devices – this is similar to incorporating some hysteresis in the decision-making.
Use Case 2: SPG9000s Without GNSS
A second use case for Dynamic Priority is shown in Figure 3. In this case GNSS is not available, so the primary SPG9000 is in Internal Reference mode and using NTP to set the initial time, and the backup SPG9000 is using Ordinary Clock mode. Ordinary Clock mode allows the backup SPG9000 to track the primary SPG9000 but take over as the GM if the primary SPG9000 becomes unavailable.
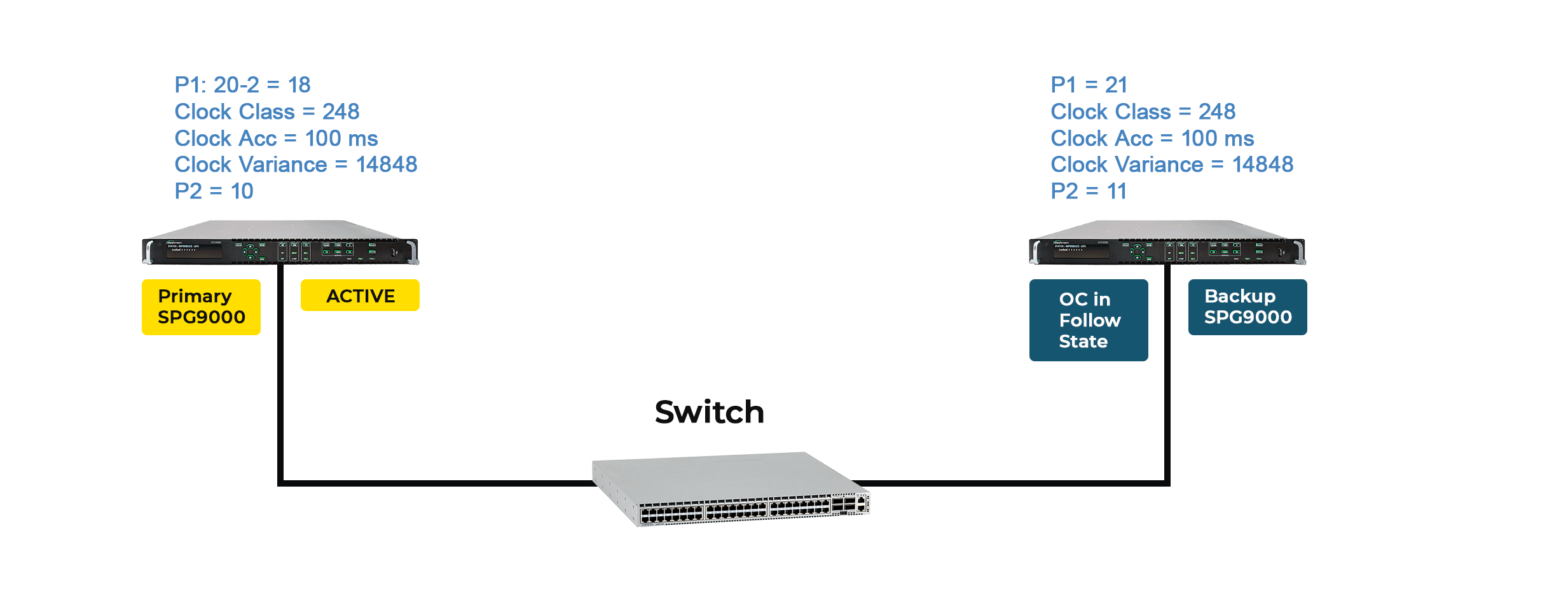
Figure 3, Dynamic Priority on Priority 1 values.
In this case, there are no clock quality changes to drive the BMCA, so Dynamic Priority will be used on the priority 1 parameter.
For this use case, if the primary SPG9000 becomes unavailable through loss of power, signal disconnection, etc, then the backup SPG9000 will take over. This is desired to provide continued PTP service. The time shift for this grandmaster changeover should be minimal since the backup SPG9000 had been tracking the primary SPG9000.
If the primary SPG9000 was disconnected, the two SPG9000s may drift apart. If the primary SPG9000 lost power, then when it powers up in Internal mode with NTP the time will typically be 10 μs to 10 ms different than the backup SPG9000 which is in holdover. If these types of faults are corrected in a system operating without Dynamic Priority, the primary system will resume the GM role, and a significant time shift may occur.
Preventing Time Shifts with Dynamic Priority
Dynamic Priority prevents this disruption. When the second SPG9000 becomes the active GM, the offset is dynamically applied thereby making it the best leader. The backup SPG9000 will then retain the GM role if the faults are corrected in the primary SPG9000. This avoids the undesirable GM changeover and potential timing shift seen when Dynamic Priority is not enabled.
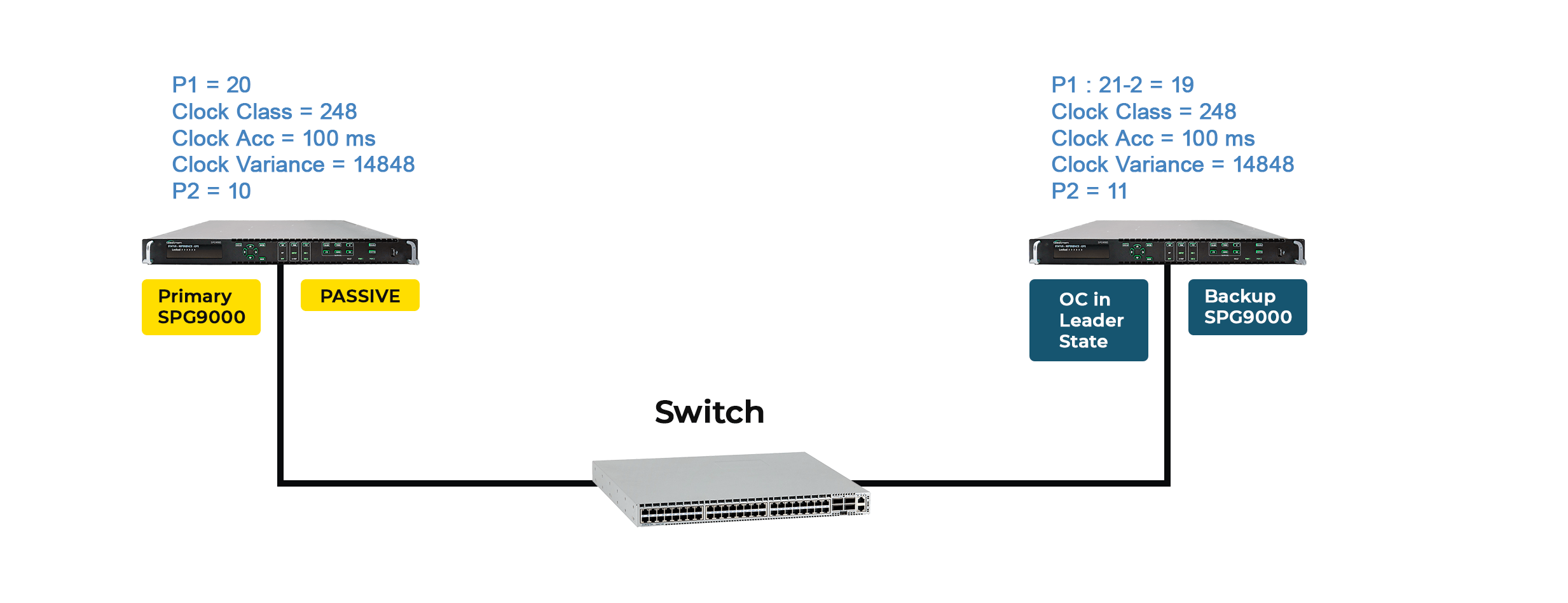
Figure 4, Using Dynamic Priority to maintain GM role when another device is restored
If there is a fault in the backup SPG9000, the primary can still take over, with the inherent time shift. The system using Dynamic Priority still uses the BMCA to select the clock, it just avoids some GM changeovers which are potentially disruptive with no benefit.
Learn More
We have covered some of the benefits of Telestream’s innovative Dynamic Priority feature for PTP systems. For more information on configuring and using Dynamic Priority, please refer to the SPG9000 User Manual or contact our Support team.
If you would like to schedule a demonstration of the innovative features of the SPG9000 sync generator, please contact us.
For more information about PTP, read our companion blog PTP System Commissioning for Grandmaster Changeover.